
PRODUCT

锅炉是发电厂最重要的生产设备,其炉内水冷壁管在长期服役中受到烟气、煤灰和火焰等侵蚀,极易出现磨损、腐蚀,造成管壁局部减薄,在管内高压、高温蒸汽的作用下,最终产生管体爆裂泄漏等严重事故。锅炉出现泄漏与一般管道出现泄漏不同,无法在生产运行中进行维修,往往要停机抢修,其经济损失巨大,因而各电厂对有效减少和避免锅炉爆管都非常重视,能在短期停炉期间不用搭满炉膛架子而对水冷壁用爬行机器人进行检查具有十分重要的意义。
二、电厂锅炉水冷壁腐蚀的类型
1、内壁垢下腐蚀
当水冷壁管受热面内由于垢下腐蚀产生的氧化物造成蒸汽停滞或流速减小时,将发生反应,并在金属表面形成磁性氧化铁膜(Fe3O4),称为“蒸汽腐蚀”,所产生的蒸汽腐蚀后生成的氢气如果不能较快地被气流带走,将与钢管表面发生作用,使之脱碳,造成钢材变脆,所以也称为“氢腐蚀”。
内壁腐蚀实质上是化学反应过程,局部温度越高反应越强烈。反应中产生的氢氧化物残余物将使局部蒸汽流速减慢,更促进了上述反应的进行,垢下腐蚀一般发生于锅炉水冷壁管向火侧内壁,破坏形式如贝壳。垢下腐蚀发生后向深度发展,致使管壁穿孔爆裂。另外,被腐蚀区域的钢材表面盖有疏松的铁锈层,造成管壁热传导性不良,出现局部管壁过热,产生材质蠕变,甚至出现管壁向外鼓包,最终破裂。
在多次不同电厂的锅炉检测中,发现水冷壁管内壁缺陷有的以下几种主要特征:
(1)缺陷多为腐蚀坑,裂纹极少;
(2)所有的腐蚀坑都发生在向火侧,以中间部位居多;
(3)腐蚀坑的面积大小,深度不同,随服役时间而发展;
(4)在炉墙上分布无规律可言。如某处出现爆管,而割开附近几处管检查都完好无损,运行一段时间又会在其它位置爆管。
2、外壁高温腐蚀
影响水冷壁外部腐蚀的最主要原因是水冷壁附近的烟气成分和管壁温度。具体地说,由于燃烧器附近火焰温度可高达1400℃左右,因此,煤中的矿物成分挥发出的腐蚀性气体较多,为受热面的腐蚀创造了条件。另外,由于燃烧器区域附近水冷壁管的热流密度很大,温度梯度也很大,管壁温度常达400~450℃,这对管壁的高温腐蚀也起着不小的作用。
锅炉水冷壁管子金属在氧、硫等氧化剂的作用下,发生氧化反应,产生高温腐蚀。当烟气和积灰层中含有腐蚀性成分时,管子将发生腐蚀,甚至造成爆管。
燃煤锅炉水冷壁上发生的高温腐蚀通常属于硫化物型高温腐蚀,主要由烟气中的H2S气体造成。在燃烧区域烟气中氧含量较低并存在还原性气体(如CO、H2等)时,煤中的硫和氯会生成H2S和HCI气体,并与水蒸气形成腐蚀性较强的酸性气体,与管壁金属氧化膜发生腐蚀反应,从而使金属表面的保护膜遭到破坏。
另外目前环保要求下的低氮缺氧燃烧是高温腐蚀的重要原因。
三、水冷壁腐蚀的危害
电厂的水冷壁在十分恶劣的环境下工作,存在磨损、拉裂、高温腐蚀、结垢等问题,这些问题不及时发现最终都可能引起事故的发生。
根据相关统计,火电机组非停事故有60%是由于锅炉“四管”爆裂引起的,“四管”爆裂里面75%是由于水冷壁的腐蚀磨损引起的。
我国将近八成的大型电站锅炉受到水冷壁高温腐蚀的影响,高温腐蚀会造成水冷壁厚度不断变薄、材料强度降低,水冷壁可能有爆管、泄漏情况的发生,危及到整个锅炉的正常安全运行。一旦发生非计划停运事故,会对发电厂带来巨大的经济损失。
因此锅炉高温腐蚀的防治对于锅炉的安全稳定运行是十分必要的,水冷壁的定期检测能及时发现,杜绝事故的发生。
四、水冷壁腐蚀的传统检测
目前国内锅炉水冷壁的检测方式,主要是人工搭脚手架或者升降平台进行检测,外壁检测主要是用肉眼和手感、用超声测厚仪测量管壁厚度找出腐蚀位置;内壁用超声波测厚仪或割管用内窥镜检查管内腐蚀情况。
锅炉炉膛内的粉尘比较大,而且需要等待炉膛内冷却到室温才能搭建脚手架。对水冷壁进行人工检查,工作环境恶劣、工作量大、进度慢、成本高。而且人为的因素、数据并不是很完善,易出现漏检。且锅炉水冷壁检修属于受限空间内高空作业,其风险程度相当高,一旦发生高空坠落将给当事人与企业造成严重后果。
五、水冷壁爬行机器人的检测
1、水冷壁爬行机器人的检测简介
我司针对水冷壁人工检测的问题开展研究。研发团队通过电厂现场考查和多次设计的实际试用,研制成功了水冷壁爬行机器人。水冷壁爬行机器人能够代替人工进行水冷壁检测,机器人采用永磁技术吸附在水冷壁上,可在水冷壁上移动,通过实时的高清视频完成对水冷壁排管浮灰的冲洗、清焦、排管外观的检测、排管壁厚度的自动检测、缺陷的定位等功能。实现了对电厂水冷壁防磨防爆的智能化全方位检测,对推动电厂安全运行、节省工期和费用具有重要意义。
2、水冷壁爬行机器人的组成和原理
机器人采用磁性吸附式结构,能够在炉膛范围内可靠攀爬,机器人垂直拉力大于200kg。并可根据不同任务进行模块组装,包括驱动行走机构、检测机构、清洗装置和显示控制器。
驱动行走机构包括车身、减速电机、车架和磁轮,减速电机设置于车身内。
检测机构包括前、后置高清摄像头、电磁超声测厚仪、定位装置,分别设置在车身上。
清洗装置包括清扫刷和两个高压喷水装置组成,分布于车身的两侧。
显示控制器采用7寸高清触摸屏的安卓系统控制终端,控制水冷壁的爬行机器人行走、检测、清洗和厚度的显示。
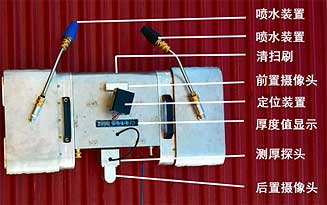
水冷壁爬行机器人组成图
3、水冷壁爬行机器人的特点及技术参数
1) 高清视频
摄像头采用200万像素CMOS图像传感器,150°大视场角,LED照明,实时1080P高清摄像、存储。可实现对现场环境、机器人的行走、管壁外观高温磨损的检测和记录。
2) 高压冲洗
搭载的2个高压水清洗系统,对水冷壁进行清洗时可达到5兆帕的冲洗力,能很高效的把水冷壁上的一些结渣、结焦冲洗掉,冲洗耗水量不大于10L/min
3) 高精度测厚
采用电磁超声测厚装置,无需耦合剂,以0.1mm精度的测量水冷壁的管壁厚度。省去了传统的超声波测厚方式必须涂抹耦合剂才能进行测厚的不方便性。
4) 内壁腐蚀坑检测
a、漏磁检测或脉冲涡流检测
搭载漏磁检测探头,可实现管内壁腐蚀坑的检测。漏磁法对管道内部缺陷具有较高的探测灵敏度,检测速度快,成本低,操作简单和信号直观清晰。漏磁法检测的基本原理是采用合适的励磁回路将磁场施于管道,使管壁局部磁化饱和,当被检区域管壁存在腐蚀坑或裂纹时,局部管壁磁阻增加,该区域的磁场产生畸变,部分磁场从管壁表面泄漏出来,形成局部区域漏磁场,漏磁场的分布与缺陷的性质和几何尺寸存在关联。用磁敏元件获得漏磁场分布状况并转化为可以观察的电信号,即可获得反映管道的缺陷图形,缺点是只能发现25%以上大小腐蚀坑,小腐蚀坑无法发现,图像不直观。
b、冷阴极数字射线检测
针对25%以下小腐蚀坑,用冷阴极数字射线直接成像技术,将冷阴极数字射线机和成像板分别放置在炉膛内外两个爬行机器人上,同步行走、拍照成像。目前,X射线数字直接成像腐蚀坑检测技术模拟试验已取得良好的效果,其配套设备及技术即将正式投入到实际应用中。
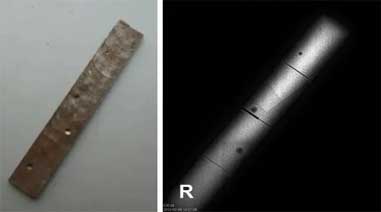
X数字射线机实时成像模拟试验效果图
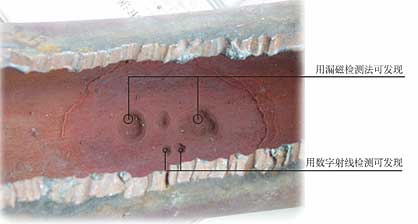
水冷壁管内壁图
5)精确定位
根据水冷壁爬行机器人行进距离进行定位,定位精度0.1mm,可以准确定位缺陷位置。
6)体积小巧
尺寸:700*360*150mm,结构紧凑、体积小;方便进出锅炉(锅炉入口孔为440mm)。

水冷壁爬行机器人工作图
